AYRINTILAR;
Kart üzerinde 1 adet L298N motor sürücü entegresi mevcuttur. Kanal başına 2A'e kadar akım verebilmektedir.
Motor voltajı 6-15V arası kullanılabilmektedir. Besleme gerilimi 5V ise kart üzerindeki Vcc-5V jumpere kısa devre yapılarak kullanılmaktadır.
Kartın kullanılmayan tüm pinleri kart üzerindeki 4'lü konnektörlere çevrilerek genel kullanım için bırakılmıştır.
Özellikler
2 adet DC motorun bağımsız kontrolü
1 adet step motorun bağımsız kontrolü
Her bir kanaldan sürekli 2A'e kadar verebilmektedir.
Sensör bağlantıları için boş bırakılmış analog ve dijital giriş pinleri
Ürün Boyutları: 68x55x30mm
Ağırlık: 37g
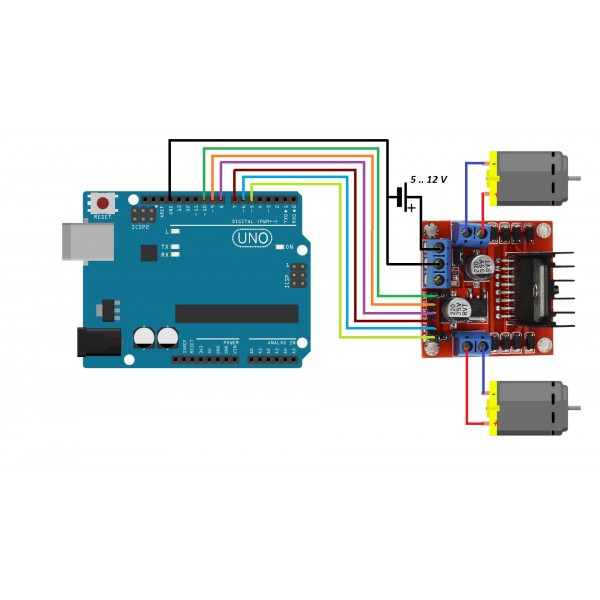
Bağlantı şeması;
DC motor 1 “+” veya stepper motor A+
DC motor 1 “-” veya stepper motor A-
12V jumper –Besleme voltajı 12V dan daha fazla ise bu jumper ı kaldırın. Regülatör devre dışı kalacaktır. Bu sebeple harici olarak 5V besleme yapmanız gerekir.
Motor Beslemesini buradan verin. Maksimum 35V DC. 12V dan fazla verirseniz 3 teki jumper ı kaldırın.
GND
12V jumper takılı ise 5V çıkış alabilirsiniz. Arduino ve diğer devreleri besleyebilirsiniz.
Step motor kullanırken burayı kullanmayın. PWM çıkışı ile DC motorda hız kontrolü yapabilirsiniz.
IN1 1.motor yön belirleme pinleri / step motor komutasyon pinleri
IN2 1.motor yön belirleme pinleri / step motor komutasyon pinleri
IN3 2.motor yön belirleme pinleri / step motor komutasyon pinleri
IN4 2.motor yön belirleme pinleri / step motor komutasyon pinleri
Step motor kullanırken burayı kullanmayın. PWM çıkışı ile 2. DC motorda hız kontrolü yapabilirsiniz.
DC motor 2 “+” veya stepper motor B+
DC motor 2 “-” veya stepper motor B-
DC Motor Kontrol Etmek için:
Bu kart L298N H-Bridge entegresi barındırmaktadır. İki adet DC Fırçalı motoru sürebilirsiniz.
Robot, araba gibi uygulamalar yapıyorsanız kabloları bağlarken artı ve eksi uçlarını aynı şekilde bağlamaya çalışın. Bu şekilde yön konusunda hata yapma oranınız azalır. İki motor beklediğiniz yöne dönmezse bir motorun kablolarını ters bağlayın.Arduino’nun 5V bağlantı pinine shield üzerinden besleme sağlayabilirsiniz. Bu şekilde motorları beslemek için kullandığınız batarya veya güç kaynağı ile farklı bir beslemeye ihtiyaç duymazsınız.
Başlangıç olarak 5 adet dijital çıkışa ihtiyaç vardır. Pinlerden 2’si PWM (pulse width modulation veya darbe genlik modülasyonu) özellikli olmalıdır. PWM pinleri arduino üzerinde (“~”) işareti ile gösterilmektedir

Resimde 11,10,9,6,5 ve 3 numaralı pinlerin PWM özellikli olduğu görülmektedir.
Son olarak Arduino dijital pinlerini sürücüye bağlayalım. Biz örneğimizde iki motor bağlıyoruz. Bu yüzden D9,D8,D7 ve D6 pinlerini IN1,IN2,IN3 ve IN4 e bağlıyoruz.
sürücüde 7 ve 12 numarada görülen Jumper ı çıkarark arduino D10 pinini pin7 ye, arduino D5 i de pin12 ye bağlıyoruz.
Motor yönü Arduino pinlerinde oluşturulan HIGH veya LOW sinyalleri ile kontrol edilmektedir.
Örneğin motor 1 için
IN1 : HIGH
IN2: LOW
şeklinde olursa motor bir yöne dönecektir.
IN1 : LOW
IN2: HIGH
şekilnde olursa da tam tersi yöne dönecektir.
Ancak motorların dönmeye başlaması için pin7 (1.Motor ) ve pin12(ikinci motor) HIGH durumunda olmalıdır. Direk olarak 5V verdiğimizde motorlar tam güç dönecektir.
PWM sinyali ile motorların hızını ayarlayabilirsiniz.